Oinride Oy haluaa soveltaa avaruus teknologiaa ja mobiilirobotiikkaa kaivosteollisuudessa parantaen tehokkuutta ja turvallisuutta.
Kaivostoimintaan tarkoitetun mobiilirobotin on kyettävä liikkumaan epätasaisessa maastossa, jossa näkyvyys voi olla heikkoa tietyillä alueilla. Robotti on niin sanottu Rocker-bogie Mars Rover, eli NASA:n kehittämään teknologiaan pohjautuva robusti mobiili laite joka on valmis kulkemaan vaikka Marssin pinnalla.
Tavoitteena luoda laitteelle paremmat ympäristöönsä soveltuvat renkaat ja kehittää Unity-pohjainen simulaatio, joka auttaa visualisoimaan robotin ympäristön ja luomaan simulaatio mallin laitteesta.

Projektin tilanne nyt
Tällä hetkellä on kehitetty Unity simulaatio, jolla on rajapinta ROS2 kanssa ja saadaan tuotua robotin generoimaa dataa Unityyn ja luotua siitä 3d-kartta ympäristöstä. Aikaisemmin luotuja ympäristöjä saadaan käytettyä simulointiin. Vielä tutkitaan kartan luontia simultaanisti ajon aikana.
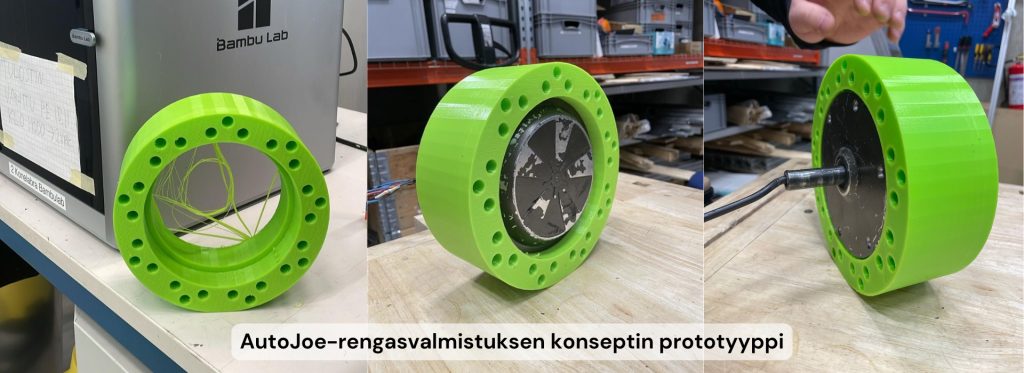
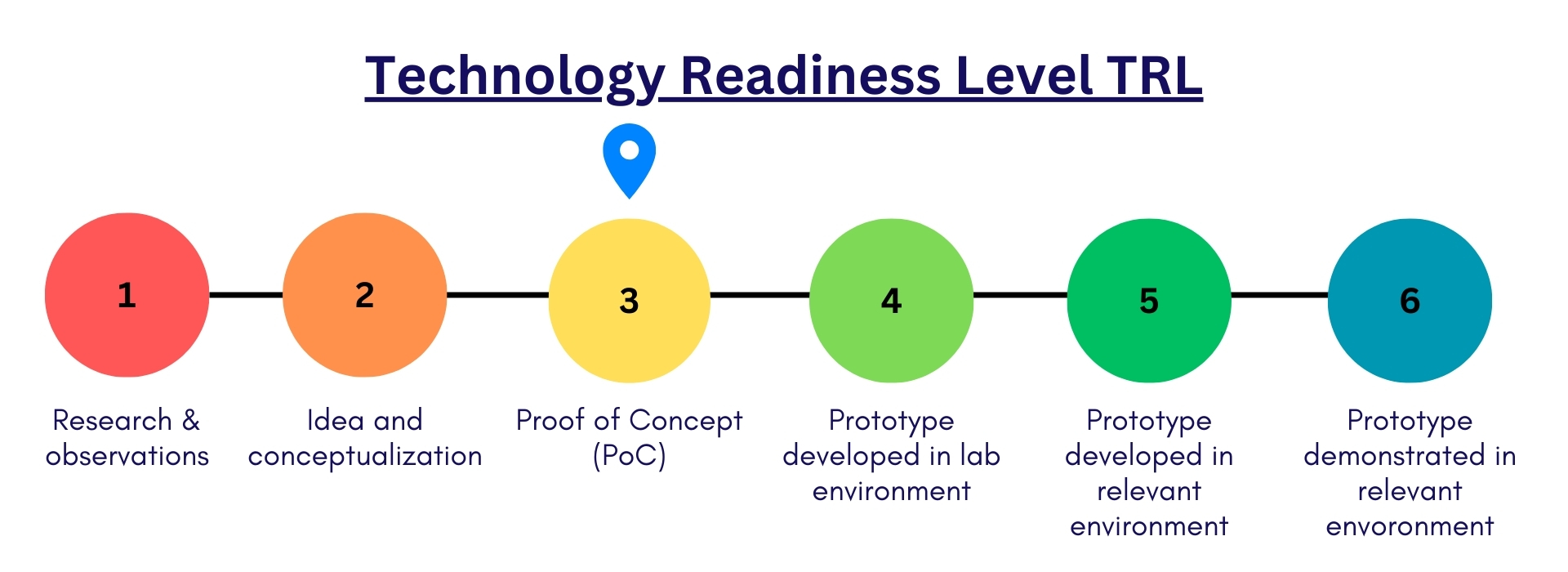
Renkaiden ensimmäisen PU- ja 3D-tuloste prototyypit ovat valmiit ja niitä aletaan nyt keväällä testaamaan. renkaita tullaan aktiivisesti jatkokehittämään kevään ja syksyn aikana parhaan mahdollisen muodon löytämiseksi.

Oinride Oy
Oinride kehittää etäohjattua mobiilirobotiikkaa vaativiin ympäristöihin. Ratkaisut lisäävät kuljettajan turvallisuutta, tuottavuutta ja kustannustehokkuutta.